Peiqi Yu
peiqiy@andrew.cmu.edu

I am a second year Ph.D. student in the Intelligent Control Lab at the Department of ECE of Carnegie Mellon University, advised by Prof.Changliu Liu.
My research focuses on long-horizon robotic manipulation using neuro-symbolic skill representations that bridge symbolic planning and continuous control. My work combines skill-based abstractions, TAMP, and learning-based methods to enable robust multi-stage execution and failure recovery in real-world environments.
I received my Bachelor’s degree in Automation at Tsinghua University, advised by Prof.Jiwen Lu.
I am currently seeking summer internship opportunities in robotics, machine learning, and automation.
news
| Jun 25, 2025 | Excited to present at the RSS Workshop on Neuro-Symbolic Packing (NeSyPack)! |
|---|---|
| May 22, 2025 | Won First Prize ($60k) in the ICRA Competition on Bimanual Packing 🏆 |
| Aug 12, 2024 | Thrilled to join the CMU ECE PhD program! |
selected publications
2026
-
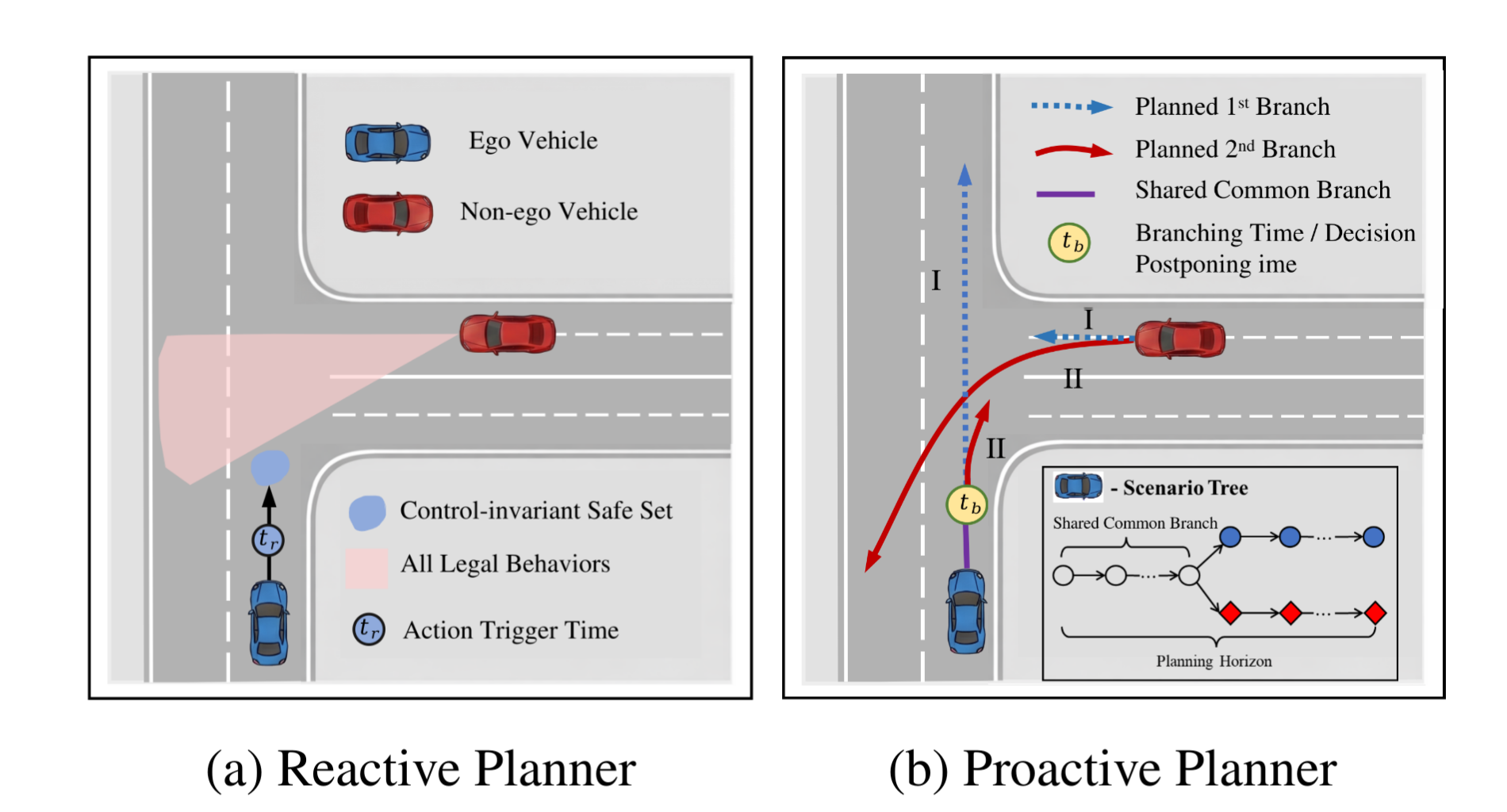 Contingency Planning for Safety-Critical Autonomous Vehicles: A Review and Perspectives2026arXiv preprint arXiv:2601.14880,
Contingency Planning for Safety-Critical Autonomous Vehicles: A Review and Perspectives2026arXiv preprint arXiv:2601.14880,
2025
-
 NeSyPack: A Neuro-Symbolic Framework for Bimanual Logistics Packing2025arXiv preprint arXiv:2506.06567,
NeSyPack: A Neuro-Symbolic Framework for Bimanual Logistics Packing2025arXiv preprint arXiv:2506.06567,
2024
-
 Robustifying Long-term Human-Robot Collaboration through a Multimodal and Hierarchical Framework2024arXiv preprint arXiv:2411.15711,
Robustifying Long-term Human-Robot Collaboration through a Multimodal and Hierarchical Framework2024arXiv preprint arXiv:2411.15711,
2022
-
 Recovering Realistic Details for Magnification-Arbitrary Image Super-Resolution2022IEEE Transactions on Image Processing,
Recovering Realistic Details for Magnification-Arbitrary Image Super-Resolution2022IEEE Transactions on Image Processing,
 Pittsburgh, PA, 15213, USA
Pittsburgh, PA, 15213, USA